Autonomous Root Tip Inoculation System
Overview
Manual pipetting in plant phenotyping is slow, inconsistent, and cannot keep up with high-throughput greenhouse environments. Existing software was semi-supervised — it still required a human in the loop. The goal was to build a fully autonomous, 24/7 inoculation system for NPEC (Netherlands Plant Eco-Phenotyping Centre).
Pipeline
1. Preprocessing — Raw high-resolution images are cropped, normalized, and split into 128px patches.
2. Mask Prediction — A dual U-Net model predicts binary segmentation masks of root structures, achieving F1 scores of 0.86 and 0.83.
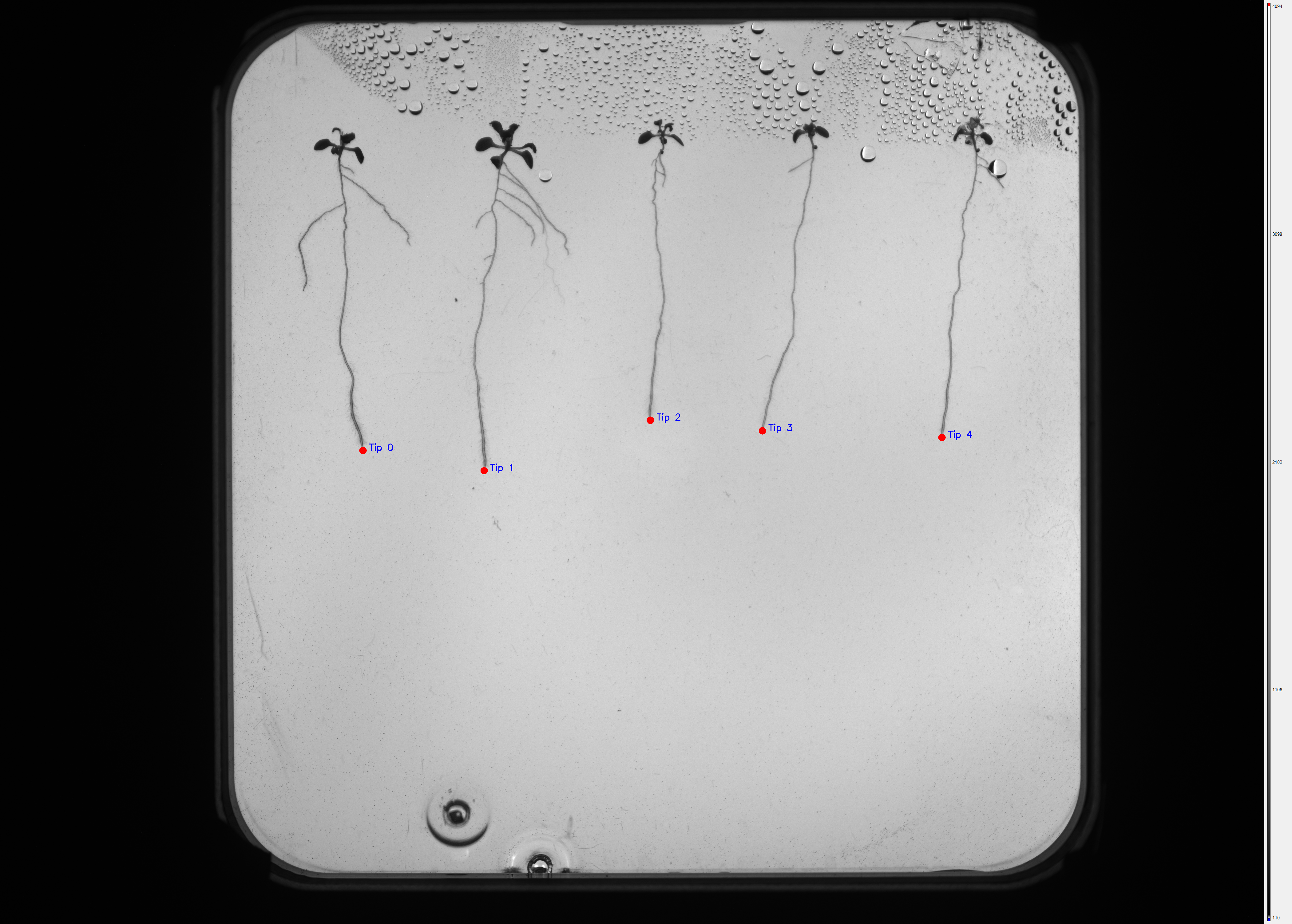
3. Root Tracing & Tip Extraction — Uses Dijkstra’s algorithm for graph theory tracing, trajectory projection to bridge gaps, neighbor reclaim for crossing roots, and biological constraints to remove condensation artifacts.
4. Controller & System Integration — A dynamic calibration pipeline translates pixel coordinates to real-world millimetre positions in real-time.
| Controller | Mean Error | Notes |
|---|---|---|
| PID | 2.13 mm | High consistency, selected for delivery |
| SAC (RL) | 8.89 mm | High variance, unpredictable wandering |
Results
Tech Stack
- Python, OpenCV, NumPy
- U-Net (TensorFlow/Keras)
- Dijkstra’s algorithm for graph tracing
- PID controller & Soft Actor-Critic (SAC) RL agent
- MuJoCo simulation environment
- NPEC greenhouse imaging data
Limitations & Future Work
- Currently trained on one plant species only
- Assumes positive gravitropism (roots grow downward)
- Cannot detect roots occluded behind the shoot
- PID and RL controllers would benefit from further tuning on real hardware +++